|
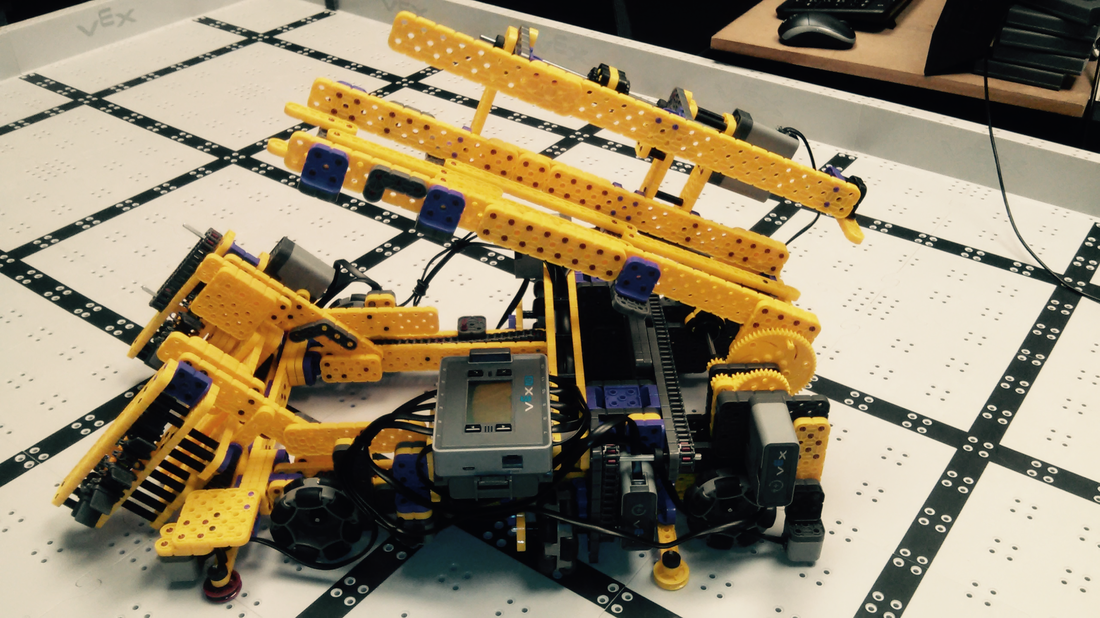
This is our robot, The Cobra. Our Robot uses a strategy called "sorting" to differentiate between the blocks and stack them according to their colour. For example, if the base block is blue, the robot will collect all of the blue blocks and place them in the upper ramp of the robot (the component elevated in the image) and if the block is not blue, the robot will place the block in the lower hopper. This system of sorting we call the "Double Decker Strategy.
Our Robot performs a function called "line following". Line Following is when the robot uses colour sensors to follow the black lines creating a grid |
pattern accross the feild. This is something that many other robots do too. What makes our robot unique is that it is capable do something called "double line following" in which the robot follows two lines at once, keeping it perfectly straight and moving paralell to the lines it is following. This is very hard to program and design into your robot as you robot has to be exactly the same width as the lines are appart, while concidering sise restrictions.
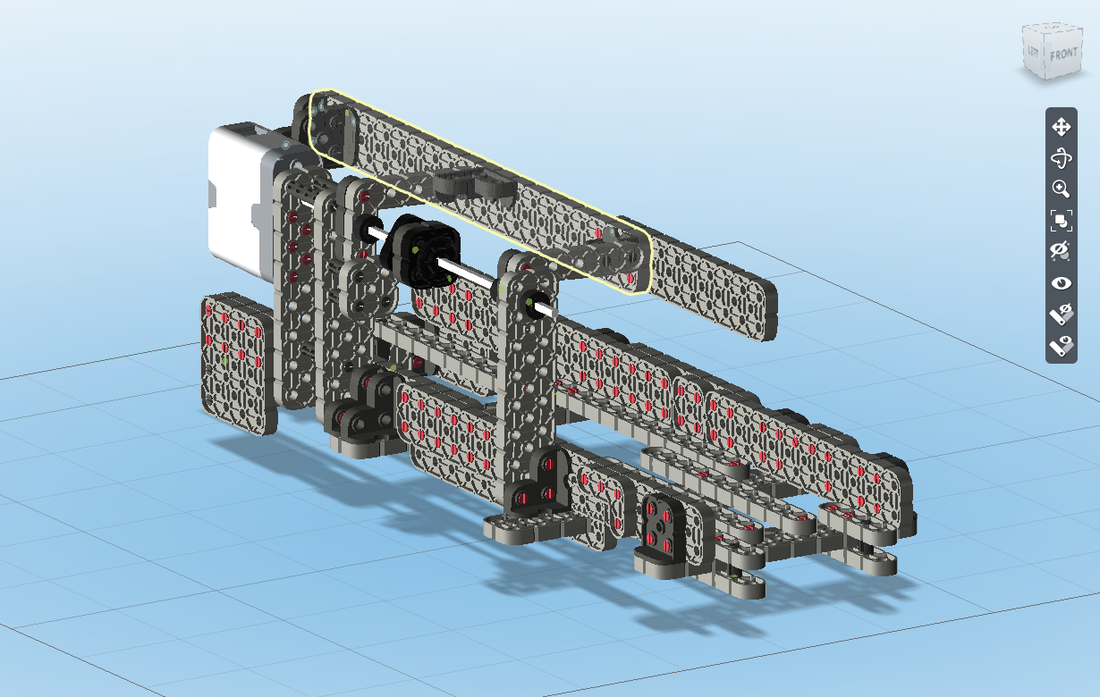
Ramp and GripperThe Ramp and Gripper is a Class Three lever system that's purpose is to collect and, together with the rest of the robot, sort the blocks according to colour and deposit the stack on the respective block colour.
|
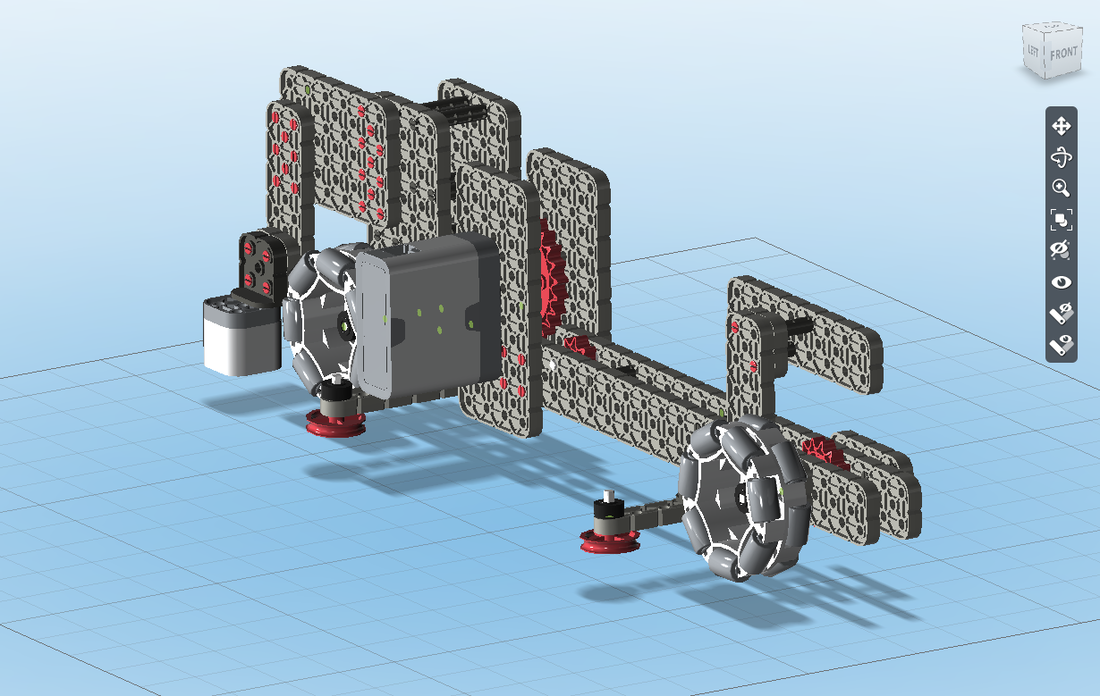
Drive BaseThe Drive Base is responsible for directing the Robot around the playing feild. The Drive Base has a flat back so it can square up against walls to make it more accurate. It utilizes omni wheels so it can manouver not only forward and backward but transversly accross the felid.
|
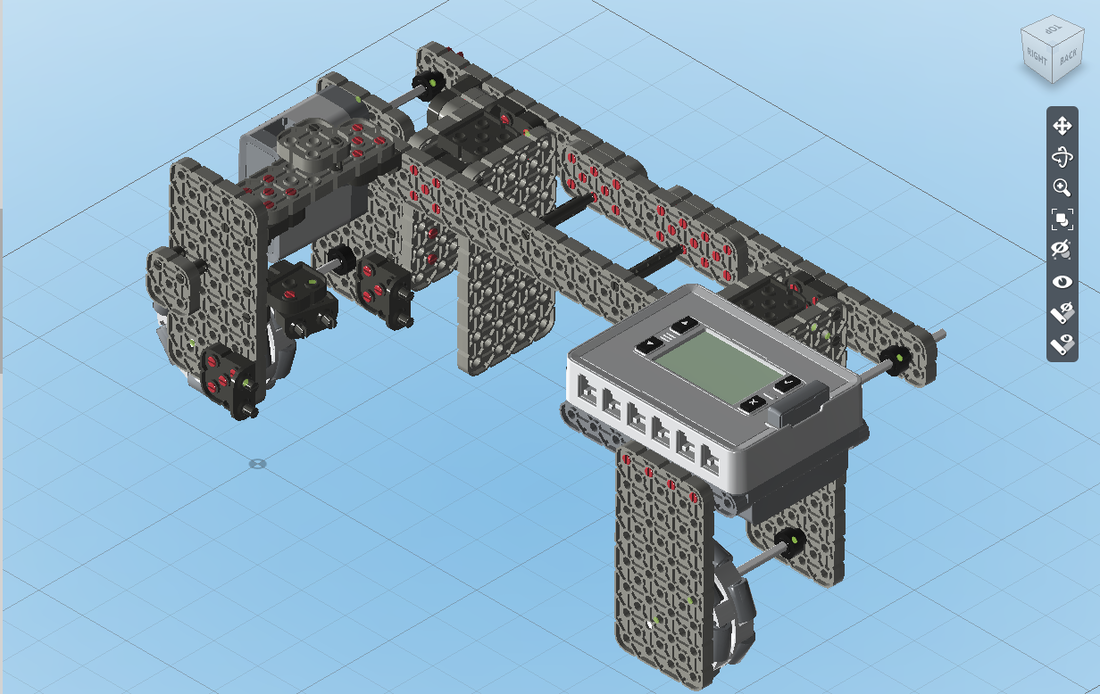
StrafeThe Strafe component of the Robot allows the robot to transverse the feild as well as the natural forward, backward motion. This compontent of the Robot also holds the Brain and the wireing harness making, optimizing the speed and agility of the Robot.
|
